
:quality(80)/p7i.vogel.de/wcms/63/cf/63cf63c2bbab870979bcfb5d45862a10/0132395722v2.jpeg "An der Mitgliederversammlung von UCIMU – Sistemi per Produrre nahmen mehr als 150 Gäste teil, darunter Unternehmer und Manager der Branche, Vertreter von Institutionen sowie Medienvertreter. (Bild: ANASTASIO CARLO)")
:quality(80)/p7i.vogel.de/wcms/71/68/71680bcb892856e5e967211c4acb5327/0132395191v2.jpeg "Barac Bieri und Ninyan Bieri von der Swissplast Group: «Mit der erfolgreichen Transaktion wurde der Weg für die langfristige Weiterentwicklung der Standorte Haiterbach und Lindlar innerhalb der Swissplast Group geebnet.» (Bild: Swissplast)")
:quality(80)/p7i.vogel.de/wcms/19/c0/19c04affd54ea15978eebf40fd09e9ba/0132375304v2.jpeg "Die Umfrage zur Marktentwicklung kann auf der Website von Tebis Consulting heruntergeladen werden. (Bild: Tebis Consulting)")
:quality(80)/p7i.vogel.de/wcms/75/75/75755ed8b0d048e6f2df10d97f718b46/0132238819v2.jpeg "Vom 22. bis 24. April 2026 fand in Aachen der AKL’26 – International Laser Technology Congress statt. Dort informierten mehr als 90 Vortragende die 544 Fachleute über den aktuellen Stand der industriellen Lasertechnik. (Bild: Fraunhofer ILT, Aachen / Andreas Steindl.)")
:quality(80)/p7i.vogel.de/wcms/bd/84/bd844ad4f2e032319c31dbacc3aa483d/0132102952v2.jpeg "Die neue Generation «Evoline» Axial-Rollköpfe wurde speziell für die automatisierte Fertigung von grossen Gewinden in hochfesten Materialien entwickelt. (Bild: LMT)")
:quality(80)/p7i.vogel.de/wcms/8a/33/8a33ffed66311a1422a69c2e75c76450/0132102940v2.jpeg "Maschinenbediener Lukas Dömötör ist rundum zufrieden mit der «Forte 85 Single 1620». Selbst in der Schwerzerspanung liefert die Maschine eine tadellose Massstabilität – und ermöglicht so spürbare Produktivitätssteigerungen. (Bild: Christoph Schwarz, Gewo Feinmechanik GmbH & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/53/69/53699ef14345f8d802ee0d5d5887b496/0132048847v2.jpeg "Fliegender Wechsel für minimierte Rüstzeiten: Auch bei laufenden Sägearbeiten können Bediener unterschiedliche Funktionen und Bedienfelder zu weiteren Sägeaufträgen aufrufen und Daten eingeben. (Bild: Kasto)")
:quality(80)/p7i.vogel.de/wcms/d3/c6/d3c6ff406aaf5ad2038f255e3099b30b/0132048435v2.jpeg "Spritzgiessfertigung wird es in Zukunft ohne abgestimmte KI-Strategie nicht mehr geben. Wer heute Neuinvestitionen plant, kommt nicht umhin, die Integrationsoffenheit der Steuerung mit derselben Priorität zu bewerten wie Schliesskraft und Zykluszeit. (Bild:Sasint - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/a5/dc/a5dc8a72e6382359480457dd5ea9f6d6/0132048417v2.jpeg "Stets aktuell: Über die aktuellen Softwaremodule von Lantek können Blechverarbeiter ihre Produktion auch online unabhängig von Aufentaltsorten überwachen und planen. (Bild: Lantek)")
:quality(80)/p7i.vogel.de/wcms/c6/f2/c6f2b521ffa60096e11d1873891c933e/0132048123v2.jpeg "Informationen, die in Bilder der realen Bauteile eingeblendet werden – beispielsweise 2D-CAD-Daten –, tragen dazu bei, qualitätsbestimmende Merkmale schnell und zuverlässig zu erkennen. (Bild: Visometry)")
:quality(80)/p7i.vogel.de/wcms/01/c6/01c6b28a8ba82eb7843d9bc5e67dfc35/0132250464v2.jpeg "ABB Robotics und Roche entwickeln gemeinsam neue Robotiklösungen für klinische Labore. (Bild: ABB Robotics)")
:quality(80)/p7i.vogel.de/wcms/37/90/37903678a8ef48784c5b6cbe53299702/0132250715v2.jpeg "ABB Robotics und Psyonic arbeiten zusammen, um das Greifen und die Geschicklichkeit von Robotern zu verbessern – eine Schlüsselkompetenz für autonome, vielseitige Roboter (Autonomous Versatile Robotics, kurz AVR). (Bild: ABB Robotics)")
:quality(80)/p7i.vogel.de/wcms/ac/51/ac512bf1c07a07f157e3ff0fb3095b16/0132249346v2.jpeg "V. l. n. r.: Jane Heffner übernimmt von Takayuki Ito in Chicago. (Bild: International Federation of Robotics)")
:quality(80)/p7i.vogel.de/wcms/95/e0/95e06ebb99c296e6333f9837fa1bba8f/0132367577v2.jpeg "Damit der Sommerurlaub pünktlich beginnt: In der automatisierten Fluggastbrücke von «REEL» sorgen Energieketten und Leitungen von Igus für eine hohe Ausfallsicherheit im Flughafenbetrieb. (Bild: Igus SE & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/ae/9a/ae9ae612dc61a247e364784422fb3940/0132364675v2.jpeg "Forschende von «MaterialsCommons» beim Kick-Off-Meeting am 17. Juli 2026 in Karlsruhe. (Bild: Fraunhofer IWM)")
:quality(80)/p7i.vogel.de/wcms/d6/23/d623e0b328bb12863d49fb985323549b/0132296015v2.jpeg "Joël Mesot und Reinhold R. Geilsdörfer, Vorsitzender der Geschäftsführung der Dieter Schwarz Stiftung, drücken gemeinsam den Startknopf zur Eröffnung. (Bild: imagis / ETH Zürich)")
:quality(80)/p7i.vogel.de/wcms/e0/3e/e03eb00ea656dfdd51ff96ec1d989ae7/0132292913v2.jpeg "Das FHNW Rover-Team qualifiziert sich für die European Rover Challenge 2026. (Bild: FHNW )")
:quality(80)/p7i.vogel.de/wcms/12/09/1209849384d2fc64763d4be24e5d25c3/0132250748v2.jpeg "V. l. n. r.: Christophe Ballif (Scientific Advisor, CSEM), Andrea Dunbar (CTO, CSEM), Kerem Artuk (R&D Engineer, CSEM), Claude Nicollier (ehemaliger Präsident des CSEM und Schweizer Astronaut) und Christian Wolff (EPFL PV Lab). (Bild: CSEM)")
Sepios, der neue Unterwasserroboter der ETH Zürich Vom Kalmar zum Roboter
Die Ozeane sind voll von Geheimnissen und Geschöpfen. Die Vielfalt der Tierwelt unter Wasser ist scheinbar grenzenlos und beeinflusst Künstler und Mediziner wie auch Ingenieure. Ein Beispiel dafür, wie die Technik von Geschöpfen aus dem Meer inspiriert wird, ist das Fokusprojekt «Sepios» der ETH Zürich. Das Studentenprojekt befasst sich mit dem bemerkenswerten Fortbewegungskonzept von Kalmaren und Sepien.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/104600/104618/65.png "Kubo_CMYK_Claim_DE.png ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/79400/79431/65.gif "Ramseier_-_Logo.gif ()")
Sepien und Kalmare verfügen über zwei Seitenflossen, die sich entlang ihres stromlinienförmigen Körpers erstrecken. Die Meerestiere vollführen mit ihren Flossen wellenförmige Bewegungen, um unter Wasser Schub zu generieren. Ihre annähernd symmetrische Körperform erlaubt ihnen dabei, sich vorwärts wie auch rückwärts praktisch gleich gut fortzubewegen. Sie sind ausserdem in der Lage, aus voller Fahrt abrupt abzubremsen und sofort in die Gegenrichtung zu beschleunigen.
Flossengetrieben
Fasziniert von diesem Antriebsmechanismus, starteten neun Studierende in Maschinenbau und Elektrotechnik ihr Bionikprojekt im Sommer 2013 beim Autonomous Systems Lab (ASL) am Maschinenbaudepartement der ETH Zürich. Ihr Ziel ist die Entwicklung und Herstellung eines flossengetriebenen Unterwasserroboters. Die den Kalmaren nachempfundenen Seitenflossen sollen dem Roboter erlauben, sich omnidirektional unter Wasser fortzubewegen.
Das Antriebskonzept der Kalmare ist in vielerlei Hinsicht von technischem Interesse: Es handelt sich um extrem effiziente Raubtiere, die in der Lage sind, unter Wasser sehr präzis zu manövrieren. Ihre Flossen erzeugen zwar Wirbel im Wasser, die potenzielle Beutetiere aufschrecken könnten; diese lassen sich jedoch durch geschickte Flossenbewegungen von der Beute fortlenken.
Untersuchung und Unterhaltung
Damit eignet sich das Konzept z. B. für Filmaufnahmen von Meereslebewesen, die von einem propellerbetriebenen Gerät aufgeschreckt und verscheucht würden. Die hohe Flexibilität erlaubt zudem das Navigieren durch enge Röhren und Spalten, was etwa bei der Untersuchung von Schiffswracks oder Unterwasserhöhlen nützlich sein könnte. Dazu kommt, dass die Seitenflossen im Vergleich zu herkömmlichen Propellerantrieben viel weniger dazu tendieren, sich in Algen oder Seegras zu verfangen. Nicht zuletzt könnte man sich die optisch ansprechenden Flossenbewegungen auch zu Entertainmentzwecken in grossen Aquarien vorstellen. Dort könnte der Roboter während einer Fischfütterung Nahaufnahmen der Tiere für die Besucher auf einen Bildschirm übertragen.
All diese Ideen lassen sich leider nicht in den zwei Semestern, die für das Projekt zur Verfügung stehen, realisieren. Daher konzentrieren sich die Studierenden darauf, die hohe Manövrierbarkeit zu demonstrieren, die das Antriebskonzept verspricht. Das ist der Grund, warum die Omnidirektionalität des Roboters als wichtigstes Ziel definiert wurde. Um dieses sicher erreichen zu können, wird der Roboter – im Gegensatz zum natürlichen Vorbild – mit vier Flossen konzipiert, die sich modular anbringen und wieder demontieren lassen. Die Konstruktionsphase wurde kurz vor Weihnachten 2013 abgeschlossen. Mit Beginn dieses Frühlingssemesters beginnen die Montage und erste Steuerungsversuche.
36 Servomotoren
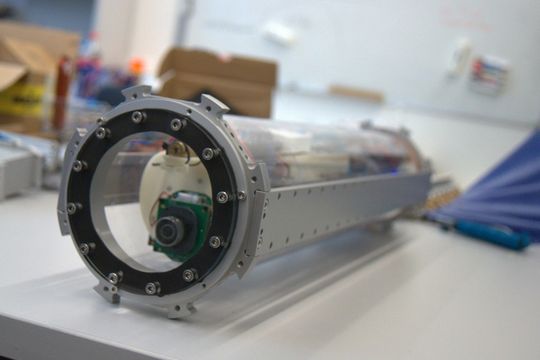
Den Rumpf des Geräts bildet ein etwa 60 Zentimeter langer Zylinder aus Acrylglas mit rund zwölf Zentimeter Durchmesser, der in ein Aluminiumskelett eingefasst ist. Viele der Teile am Rumpf basieren dabei auf einem bereits vorhandenen Roboter, der ebenfalls an der ETH entwickelt wurde. Blickt man auf den Deckel dieses Zylinders, so sieht man die vier Flossen sternförmig im 90-Grad-Winkel um den Rumpf herum angeordnet. Sie erstrecken sich beinahe vom Bug bis zum Heck. Die Aktuatoren der einzelnen Flossen werden in Aluminiumgehäusen untergebracht, von denen jedes neun Servomotoren und die für deren Betrieb nötige Elektronik enthält.
(ID:42652070)
:quality(80)/p7i.vogel.de/wcms/80/5c/805c2745f4c4c5dff7093fce3870c538/0126405626v2.jpeg "0126405626v2 (Bild: ETH Zürich)")
:quality(80)/p7i.vogel.de/wcms/de/fa/default_article/default-article-image.jpeg "Default article image (Maks Lab - stock.adobe.com)")