
:quality(80)/p7i.vogel.de/wcms/98/b5/98b5b8526f1f9abb97a588b0aeaed65f/0132617318v2.jpeg "Wolfgang Ulmer, Managing Director der Grob Schweiz AG, sprach mit Nastassja Neumaier, stv. SMM-Chefredaktorin, über 100 Jahre Grob und die Zukunftsfähigkeit des Werkplatzes Schweiz. (Bild: Matthias Böhm)")
:quality(80)/p7i.vogel.de/wcms/86/53/8653d135ac939cb4273b3f161ad8e4c0/0132616414v2.jpeg "Umang Maradia (li., Managing Director) und Thomas Wengi (re., Sales Director, beide Agie Charmilles) vor dem neuen Produktionsstandort von Agie Charmilles in Losone. (Bild: Matthias Böhm)")
:quality(80)/p7i.vogel.de/wcms/7c/d7/7cd77b86466ea73a47798ab010d631c8/0132591671v2.jpeg "Der Messeauftritt soll deutlich machen: Wer in der Schweiz auf Rockwell Automation setzt, findet in Routeco einen Partner, der Technologie nicht nur bereitstellt, sondern in funktionierende, wirtschaftliche Lösungen überführt. (Bild: Routeco)")
:quality(80)/p7i.vogel.de/wcms/ba/01/ba01efee77344c70f3fa98deb98b3e99/0132618837v2.jpeg "Remo Knecht, Schichtleiter bei Burckhardt Compression, beim Einspannen eines Werkzeuges in einen «powRgrip»-Werkzeughalter. (Bild: Vischer & Bolli)")
:quality(80)/p7i.vogel.de/wcms/69/e2/69e29a56bbf47b663ece73c8fcfab190/0132617886v2.jpeg "Escha, Fehlmann, Gibas und Evomecs arbeiteten von Anfang an eng zusammen, um die technischen, organisatorischen und digitalen Anforderungen optimal aufeinander abzustimmen. V. l. n. r.: Alain Strebel (Verkaufsleiter Nord-Europa, Fehlmann), Benjamin Unruh (Projektmanager, Escha), Enrico Akkerman (CCO, Gibas) und Peter Potjans (Fehlmann). (Bild: Fehlmann)")
:quality(80)/p7i.vogel.de/wcms/53/69/53699ef14345f8d802ee0d5d5887b496/0132048847v2.jpeg "Fliegender Wechsel für minimierte Rüstzeiten: Auch bei laufenden Sägearbeiten können Bediener unterschiedliche Funktionen und Bedienfelder zu weiteren Sägeaufträgen aufrufen und Daten eingeben. (Bild: Kasto)")
:quality(80)/p7i.vogel.de/wcms/d3/c6/d3c6ff406aaf5ad2038f255e3099b30b/0132048435v2.jpeg "Spritzgiessfertigung wird es in Zukunft ohne abgestimmte KI-Strategie nicht mehr geben. Wer heute Neuinvestitionen plant, kommt nicht umhin, die Integrationsoffenheit der Steuerung mit derselben Priorität zu bewerten wie Schliesskraft und Zykluszeit. (Bild:Sasint - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/a5/dc/a5dc8a72e6382359480457dd5ea9f6d6/0132048417v2.jpeg "Stets aktuell: Über die aktuellen Softwaremodule von Lantek können Blechverarbeiter ihre Produktion auch online unabhängig von Aufentaltsorten überwachen und planen. (Bild: Lantek)")
:quality(80)/p7i.vogel.de/wcms/c6/f2/c6f2b521ffa60096e11d1873891c933e/0132048123v2.jpeg "Informationen, die in Bilder der realen Bauteile eingeblendet werden – beispielsweise 2D-CAD-Daten –, tragen dazu bei, qualitätsbestimmende Merkmale schnell und zuverlässig zu erkennen. (Bild: Visometry)")
:quality(80)/p7i.vogel.de/wcms/ac/f1/acf12aa893128ac99f5e614f3b54bc71/0132542256v2.jpeg "(Bild: KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/d8/b0/d8b0289d9bee73ec35c226a7972f5bbf/0132535837v2.jpeg "Der neu gewählte Vorstand von GOP (v. l. n. r.): Rolf Freiburghaus, Michelle Schenker, Andreas Bachmann, Julia Lacher, Holger Hanau und Marco Carrano. Nicht abgebildet: Willi Graf. (Bild: Gesellschaft für Fluidtechnik (GOP))")
:quality(80)/p7i.vogel.de/wcms/95/e0/95e06ebb99c296e6333f9837fa1bba8f/0132367577v2.jpeg "Damit der Sommerurlaub pünktlich beginnt: In der automatisierten Fluggastbrücke von «REEL» sorgen Energieketten und Leitungen von Igus für eine hohe Ausfallsicherheit im Flughafenbetrieb. (Bild: Igus SE & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/8f/d3/8fd3ed6832ff422cae482706ba24dd57/0132541011v2.jpeg "Das Konsortialteam des Forschungsprojektes «SKIPRO». (Bild: WZL)")
:quality(80)/p7i.vogel.de/wcms/ae/9a/ae9ae612dc61a247e364784422fb3940/0132364675v2.jpeg "Forschende von «MaterialsCommons» beim Kick-Off-Meeting am 17. Juli 2026 in Karlsruhe. (Bild: Fraunhofer IWM)")
:quality(80)/p7i.vogel.de/wcms/d6/23/d623e0b328bb12863d49fb985323549b/0132296015v2.jpeg "Joël Mesot und Reinhold R. Geilsdörfer, Vorsitzender der Geschäftsführung der Dieter Schwarz Stiftung, drücken gemeinsam den Startknopf zur Eröffnung. (Bild: imagis / ETH Zürich)")
:quality(80)/p7i.vogel.de/wcms/e0/3e/e03eb00ea656dfdd51ff96ec1d989ae7/0132292913v2.jpeg "Das FHNW Rover-Team qualifiziert sich für die European Rover Challenge 2026. (Bild: FHNW )")
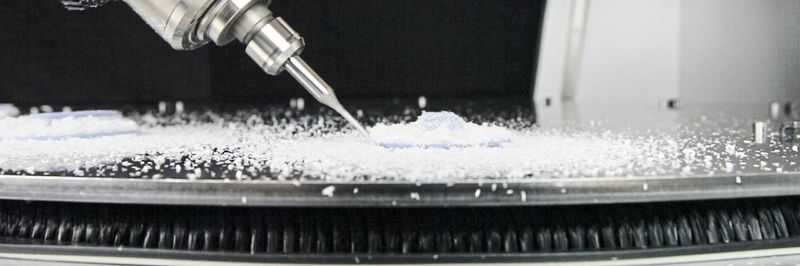
Denso-Roboter fräst filigrane Kunststoffteile hochpräzis Wenn ein 6-Achs-Roboter 3D-Kunststoffteile fräst
Präzision ist in fast allen Branchen ein wirtschaftliches Muss, so auch in der Medizinbranche. Daher entschied sich ein Maschinen- und Sondermaschinenbauer bei der Herstellung filigraner 3D-Kunststoffteile für einen 6-Achs-Roboter.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/121500/121543/65.jpg "Neues Logo Einfuehrung 2016.jpg ()")
Moderne Medizintechnik gilt angesichts des demografischen Wandels, der zunehmenden Konvergenz von Mensch und Technik in der Medizin als eine der wichtigsten globalen Innovations- und Wachstumsbranchen.
Deutschland spielt als drittgrösster „Medtech“-Produzent der Welt eine führende Rolle. Ein allerdings oft übersehenes Teilsegment dieses Marktes sind intelligente, aktive, diagnostische oder auch rein passive Implantate.
Meist sind dies recht komplexe, mitunter sehr filigrane 3D-Kunststoffteile, die im menschlichen Körper eingesetzt werden – und natürlich immer passgenau angefertigt werden müssen, das heisst überwiegend in sehr kleinen Stückzahlen. Sie sind in ihrer Grundform zwar identisch, müssen aber – da jeder Patient unterschiedliche physische Anforderungen hat – individuell ausgeformt werden. Hinzu kommt, dass diese Teile hochpräzise gearbeitet und sicher sein müssen, um auch im jahrelangen Gebrauch ihre Funktion erfüllen zu können. Überdies kann in der manuellen Herstellung nie ein exakt identisches und in allen Details präzise gearbeitetes Teil entstehen.
Die manuelle Herstellung ist also so zeit- wie kostenintensiv und bei diesen Arbeiten ist die Verletzungsgefahr relativ hoch. Ferner ist die Übertragung der Parameter und Daten für die Herstellung der entsprechenden Teile aus der ärztlichen Diagnostik in die bislang manuelle Produktion oft kompliziert und zeitaufwendig. Die Herstellung von Kunststoffteilen für die Medizintechnik wird in einer innovativen, komplett automatisierten 3D-Fräsanlage von Klement Engineering in Neu-Ulm heute auf eine ganz neue Weise umgesetzt – und ein Denso-Robotics-Modell VS-060 spielt dabei eine zentrale Rolle.
Das 2009 von Peter Klement gegründete Unternehmen versteht sich als Kreativzentrum für Maschinen- und Sondermaschinenbau: Klement Engineering ist unter anderem spezialisiert auf die Realisierung verschiedener kundenspezifischer Roboterlösungen zur Automatisierung stetig wiederkehrender Arbeitsabläufe.
Vollautomatische Anlage fräst passgenau
In der Fräsanlage übernimmt ein Denso-Roboter VS-060 die zentrale Funktion: Er fräst die gewünschten Kunststoffteile passgenau – schnell und zuverlässig sowie mit den geforderten, individuellen Ausformungen. Die Anlage läuft vollautomatisch, nur die Bestückung mit dem Grundmaterial erfolgt noch manuell. Diese Teile fräst die Anlage in geringen Produktionszahlen von einem bis zwölf Stück.
Dabei ist die Fräsgeschwindigkeit des Roboters sehr hoch, der für ein Werkteil durchschnittlich lediglich 35 s benötigt – in der manuellen Fertigung dauert dies bis zu 45 s; angesichts einer herkömmlichen Tagesleistung von 100 Teilen ist dies eine effiziente, kosten- und zeitsparende Leistung. Vor allem aber fertigt der Roboter die Kunststoffteile fehlerfrei; die Genauigkeit in der Wiederholung der Fräsvorgänge ist extrem hoch.
Mehrere Produkte in gleichbleibender Qualität herstellen
Die vom Roboter ausgeführten Fräslinien, die sogenannten 3D-Splines, sind stets identisch – dies gelingt bei einer manuellen Erstellung nicht. Dadurch kann der Kunde, sofern erforderlich, mehrere Produkte in den exakt selben Abmessungen und in stets gleichbleibender Qualität erhalten. Die derzeit zu erstellenden Kunststoffteile haben eine Grösse von
80 mm × 80 mm × 30 mm und sind jeweils individuell gefertigt.
Klement Engineering entschied sich für einen Denso-Roboter, weil sich dieser leicht mit der CAM-Software verknüpfen lässt. Der Roboter kann ausserdem präzise kalibriert und sehr einfach programmiert werden. Überzeugt haben die Ingenieure auch die Langlebigkeit und technische Zuverlässigkeit.
Dabei war der VS-060 die natürliche Wahl für die Anlage: Denn um 3D-Fräsarbeiten ausführen zu können, wird ein Sechs-Achs-Roboter benötigt, um eine möglichst hohe Anzahl an Achsen zu erhalten und alle Fräspositionen zu erreichen. Die sechs Achsen bieten zahlreiche Vorteile, denn das Werkstück muss so nicht gedreht werden, weil der Roboter alle Positionen beim Fräsen selbst erreichen kann. Und da das Werkstück nicht gedreht werden muss, kann ohne Unterbrechung gefräst und anschliessend das nächste Werkteil eingelegt werden.
CAM-Programm generiert Daten eines 3D-Rohmodells als Vorlage
Das Gesamtsystem besteht aus zwei PCs sowie dem VS-060 Roboter, einer am Roboterarm angebrachten Fräse sowie einer zusätzlich montierbaren Saugbürste für den Roboterarm. Der Roboter ist in der kompakten Anlage an einer Wand befestigt; alle Anschlüsse führen direkt aus dem Roboterfuss in den hinter der Anlage stehenden Schaltschrank. Die Steuerung der Anlage erfolgt über die beiden PCs: Zum einen ist dies ein stationärer PC an der Anlage, der andere PC steht beim Kunden und verfügt über ein CAM-Programm, das die Daten eines 3D-Rohmodells als Vorlage für die zu erstellenden Kunststoffteile generiert. Auf der Grundlage dieses Rohmodells, dessen Daten an den PC in der Anlage übermittelt werden, fräst der Roboter die jeweiligen Kunststoffteile nach. Die Schnittstellen zwischen dem PC mit CAM-Software, dem stationären PC und dem Roboter sind klar strukturiert. Die Daten des im CAM-Programm erstellten Modells werden an den Touchscreen-PC der Anlage weitergegeben. Dessen Bedienung ist höchst nutzerfreundlich – hier werden alle Daten und Bedienelemente auf einer grafischen Oberfläche übersichtlich dargestellt: Der Nutzer legt die zu bearbeitenden Produkte in die Anlage, wählt das entsprechende Fräsprogramm und startet das System. Ferner legt er die Stückzahl fest. Das Programm wird dann an die Robotersteuerung übergeben – jetzt übernimmt der RC8-Controller.
Roboter führt die Fräse entlang der 3D-Linien
Die aus der CAM-Software erstellten Wegbefehle werden so direkt an den Roboter übertragen; der Roboter fräst dann analog zum Modell die 3D-Splines entlang der vorgegebenen Linien, das heisst, die Fräse wird durch den Roboter entlang der 3D-Linien geführt und trennt so das Bauteil aus dem Grundmaterial ab. Dabei erfolgt die Kommunikation über Orin (Open Resource Interface for the Network), eine Programmierschnittstelle, mit deren Hilfe sich der Roboter mit verschiedensten Hochsprachen über das TCP/IP-Protokoll programmieren lässt. Neben dem Fräsen übernimmt der Roboter eine weitere Funktion – er saugt mit einer Saugbürste die angefallenen Späne ab; eine wichtige Zusatzfunktion, damit die Bauteile sauber ausgeliefert werden können.
Dieser Beitrag ist zuerst auf unserem Partnerportal maschinenmarkt.vogel.de erschienen.
* Steffen Wissel ist Projektverantwortlicher bei der Denso Robotics Europe in 64546 Mörfelden-Walldorf, Tel. (0 61 05) 27 35 15-0, info@densorobotics-europe.com
(ID:45325286)
:quality(80)/p7i.vogel.de/wcms/58/2b/582be3eca5b7dd366d62c08e8c9fa3e5/0129961891v2.jpeg "Massgefertigt: Rechts oben das Fräsbearbeitungszentrum «RXP 601 DSH Z2» mit Doppelspindel, mittig der Roboter und links das Magazin mit Werkstücken und Werkzeugen. (Bild: Klaus Vollrath)")
:quality(80)/p7i.vogel.de/wcms/db/0a/db0acb634161d828ab28d4f38b66f1de/0131456082v2.jpeg "Die von Mitutoyo verwirklichte Software erkennt automatisch PMI und geometrische Toleranzen in 3D-CAD-Zeichnungen und nutzt diese beim Generieren von CNC-Messprogrammen für KMG. (Bild: Mitutoyo)")