
:quality(80)/p7i.vogel.de/wcms/9e/1b/9e1b6643ca0654d48590c4396eb005c1/0132053831v2.jpeg "Durch die Partnerschaft zwischen Siemens und IFS sollen Hersteller in die Lage versetzt werden, technische Erkenntnisse mit der betrieblichen Realität zu verknüpfen. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/e5/d0/e5d016fcecb3e44553a1fe82150f17c5/0132016980v2.jpeg "Swissmem-Präsident Martin Hirzel: «Die Schweiz kann den grossen Mächten keine Regeln diktieren. Sie muss deshalb dort stark sein, wo andere zu gross, zu langsam oder zu wenig präzise sind.» (Bild: Swissmem)")
:quality(80)/p7i.vogel.de/wcms/53/07/5307a66b1c640a2eabfcf020de0b952b/0132016867v2.jpeg "(Bild: © Oleksandr Bachurin (stock.adobe.com))")
:quality(80)/p7i.vogel.de/wcms/bd/84/bd844ad4f2e032319c31dbacc3aa483d/0132102952v2.jpeg "Die neue Generation «Evoline» Axial-Rollköpfe wurde speziell für die automatisierte Fertigung von grossen Gewinden in hochfesten Materialien entwickelt. (Bild: LMT)")
:quality(80)/p7i.vogel.de/wcms/8a/33/8a33ffed66311a1422a69c2e75c76450/0132102940v2.jpeg "Maschinenbediener Lukas Dömötör ist rundum zufrieden mit der «Forte 85 Single 1620». Selbst in der Schwerzerspanung liefert die Maschine eine tadellose Massstabilität – und ermöglicht so spürbare Produktivitätssteigerungen. (Bild: Christoph Schwarz, Gewo Feinmechanik GmbH & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/a5/dc/a5dc8a72e6382359480457dd5ea9f6d6/0132048417v2.jpeg "Stets aktuell: Über die aktuellen Softwaremodule von Lantek können Blechverarbeiter ihre Produktion auch online unabhängig von Aufentaltsorten überwachen und planen. (Bild: Lantek)")
:quality(80)/p7i.vogel.de/wcms/53/69/53699ef14345f8d802ee0d5d5887b496/0132048847v2.jpeg "Fliegender Wechsel für minimierte Rüstzeiten: Auch bei laufenden Sägearbeiten können Bediener unterschiedliche Funktionen und Bedienfelder zu weiteren Sägeaufträgen aufrufen und Daten eingeben. (Bild: Kasto)")
:quality(80)/p7i.vogel.de/wcms/d3/c6/d3c6ff406aaf5ad2038f255e3099b30b/0132048435v2.jpeg "Spritzgiessfertigung wird es in Zukunft ohne abgestimmte KI-Strategie nicht mehr geben. Wer heute Neuinvestitionen plant, kommt nicht umhin, die Integrationsoffenheit der Steuerung mit derselben Priorität zu bewerten wie Schliesskraft und Zykluszeit. (Bild:Sasint - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/c6/f2/c6f2b521ffa60096e11d1873891c933e/0132048123v2.jpeg "Informationen, die in Bilder der realen Bauteile eingeblendet werden – beispielsweise 2D-CAD-Daten –, tragen dazu bei, qualitätsbestimmende Merkmale schnell und zuverlässig zu erkennen. (Bild: Visometry)")
:quality(80)/p7i.vogel.de/wcms/88/d7/88d7f175e6062f70f0fccca01eb56a09/0132046295v2.jpeg "Komplexe, weitreichend automatisierte Maschinen, zum Beispiel zum Verpacken von Lebensmitteln und Pharmaprodukten, profitieren von einer flexibel anpassbaren Automatisierungsplattform auf Basis eines offenen Betriebssystems. (Bild: Rovema )")
:quality(80)/p7i.vogel.de/wcms/19/54/1954e6cb5b42672085da9679d2e46a41/0132041533v2.jpeg "Auf spezifische Tätigkeiten konfigurierte KI wird beispielsweise beim Schweissen die Nahtverfolgung optimieren. (Bild: Universal Robots)")
:quality(80)/p7i.vogel.de/wcms/5e/a3/5ea39d5f54e7efacff85ad9fbb5027b7/0131864753v2.jpeg "Studierende präsentieren Stadler-Vertreter Christoph Leiterer ihren Prototyp für weniger Verschleiss und Lärm bei Schienenfahrzeugen. (Bild: Cyrill Maag)")
:quality(80)/p7i.vogel.de/wcms/19/76/19769d45677f3e108acd1c9d7c63c193/0131948509v2.jpeg "(Bild: KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/f7/8c/f78c500cf879530da1fb4af30c0fda0e/0131865051v2.jpeg "Empa-Forscher Konstantin Egorov beschichtet Edelstahlkomponenten mit korrosionsbeständigem Titanoxid, um die Herstellung von grünem Wasserstoff wirtschaftlicher zu machen. (Bild: Empa)")
:quality(80)/p7i.vogel.de/wcms/7f/b8/7fb8fa5c04543435f378e1e68e084ac1/0131788325v2.jpeg "Prof. Dr. Guido McCombie, neuer Direktionspräsident der Fachhochschule Nordwestschweiz FHNW. (Bild: FHNW)")
Der Natur nachempfunden Pneumatische Robotik trifft auf künstliche Intelligenz
Ob greifen, halten oder drehen, tasten, tippen oder drücken – die menschliche Hand ist mit ihrer einzigartigen Kombination aus Kraft, Geschicklichkeit und Feinmotorik ein wahres Wunderwerkzeug. Was liegt da näher, als Roboter in kollaborativen Arbeitsräumen mit einem intelligenten Greifer auszustatten, der diesem natürlichen Vorbild nachempfunden ist?
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/13900/13929/65.jpg "101153.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/91600/91645/65.jpg "alfred-imhof_logo_cmyk_Zahnrad oben_drive solutions.jpg ()")
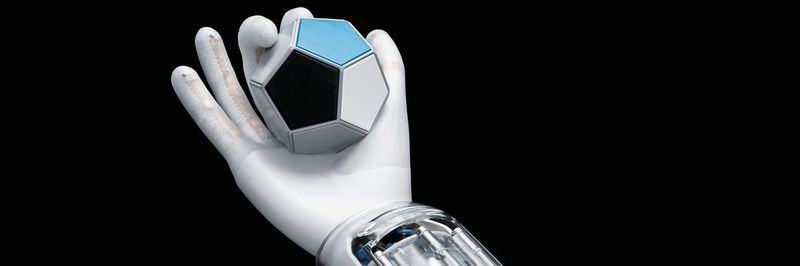
Pneumatik-Spezialist Festo präsentierte auf der Hannover Messe unter anderem die pneumatische Roboterhand BionicSoftHand, welche dem menschlichen Pendant in nichts nachstehen soll. Kombiniert mit dem BionicSoftArm, einem pneumatischen Leichtbauroboter, soll sie sich perfekt für die Mensch-Roboter-Kollaboration eignen.
Damit die BionicSoftHand sicher und direkt mit dem Menschen interagieren kann, wird sie pneumatisch betrieben. Im Gegensatz zur menschlichen Hand besitzt die BionicSoftHand keine Knochen. Ihre Finger bestehen aus flexiblen Balgstrukturen mit Luftkammern. Umschlossen sind die Bälge in den Fingern von einem speziellen 3D-Textilmantel, der sowohl aus elastischen als auch hochfesten Fäden gestrickt ist. Damit kann über das Textil genau bestimmt werden, an welchen Stellen die Struktur sich ausdehnt und damit Kraft entfaltet und wo sie an der Ausdehnung gehindert wird. Dadurch ist sie leicht, nachgiebig, anpassungsfähig und sensibel, aber dennoch in der Lage, starke Kräfte auszuüben.
Künstliche Intelligenz
Die Lernmethoden von Maschinen sind mit denen des Menschen vergleichbar: ob positiv oder negativ – sie benötigen eine Rückmeldung auf ihre Aktionen, um diese einordnen zu können und daraus zu lernen. Bei der BionicSoftHand kommt die Methode des Reinforcement Learning zum Einsatz, das Lernen durch Bestärken.
Das bedeutet: Statt einer konkreten Handlung, die sie nachahmen muss, bekommt die Hand lediglich ein Ziel vorgegeben. Dieses versucht sie durch Ausprobieren (Trial-and-Error) zu erreichen. Anhand des erhaltenen Feedbacks optimiert sie nach und nach ihre Aktionen, bis sie schliesslich die gestellte Aufgabe erfolgreich löst.
Proportionale Piezoventile für eine präzise Regelung
Um den Aufwand für die Verschlauchung der BionicSoftHand möglichst gering zu halten, haben die Entwickler eigens eine kleinbauende, digital geregelte Ventilinsel konstruiert, die direkt unterhalb der Hand angebracht ist. Dadurch müssen die Schläuche zur Ansteuerung der Finger nicht durch den kompletten Roboterarm gezogen werden. So lässt sich die BionicSoftHand mit nur je einem Schlauch für Zuluft und Abluft schnell und einfach anschliessen und in Betrieb nehmen. Mit den eingesetzten proportionalen Piezoventilen lassen sich die Bewegungen der Finger präzise regeln.
:quality(80):fill(efefef,0)/images.vogel.de/vogelonline/bdb/1426000/1426042/original.jpg "Whitepaper Cover: marconomy")
BionicSoftArm: ein Roboterarm, viele Variationsmöglichkeiten
Die strikte Trennung zwischen der menschlichen Arbeit und den automatisierten Aktionen von Robotern wird zunehmend aufgehoben. Ihre Arbeitsbereiche verschmelzen zu einem kollaborativen Arbeitsraum, in dem vor allem Roboter gefragt sein werden, die sich flexibel anpassen lassen und sich auf unterschiedliche Szenarien einstellen. Mit dem BionicSoftArm, einem flexiblen, pneumatischen Roboterarm, können in Zukunft Mensch und Maschine gleichzeitig dasselbe Werkstück bearbeiten, ohne dass sie voneinander abgeschirmt werden müssen.
Der BionicSoftArm ist eine kompakte Weiterentwicklung des BionicMotionRobot von Festo, dessen Anwendungsspektrum deutlich erweitert wurde. Möglich macht das sein modularer Aufbau: Er lässt sich mit bis zu sieben pneumatischen Balgsegmenten und Drehantrieben kombinieren. Damit ist er in Reichweite und Beweglichkeit maximal flexibel und kann bei Bedarf auch auf engstem Raum um Hindernisse herum arbeiten. Gleichzeitig ist er von Grund auf nachgiebig und kann gefahrlos mit
dem Menschen zusammenarbeiten. Eine direkte Mensch-Roboter-Kollaboration ist mit dem BionicSoftArm ebenso möglich wie der Einsatz in klassischen SCARA-Anwendungen, zum Beispiel Pick-and-place-Aufgaben.
:quality(80):fill(efefef,0)/images.vogel.de/vogelonline/bdb/1522400/1522431/original.jpg "Whitepaper Cover: Stratasys GmbH")
Flexible Anwendungsmöglichkeiten
Je nach Aufbau und montiertem Greifer lässt sich der modulare Roboterarm für die verschiedensten Anwendungen nutzen. Seine nachgiebige Kinematik erleichtert ihm die Anpassung an unterschiedliche Aufgaben an wechselnden Orten: Der Wegfall aufwendiger Sicherheitseinrichtungen wie Käfige oder Lichtschranken verkürzt die Umbauzeiten und ermöglicht so einen flexiblen Einsatz – ganz im
Sinne einer wandlungsfähigen und wirtschaftlichen
Fertigung. SMM
(ID:45847820)
:quality(80)/p7i.vogel.de/wcms/64/57/6457782b6b32279a5f8b75daafb414e4/0127543924v2.jpeg "0127543924v2 (Bild: Vogel Professional Education)")
:quality(80)/p7i.vogel.de/wcms/1f/26/1f26c28839af1a600c561df652087a46/0130566319v2.jpeg "Das Ceilix-Team freut sich über den Best Product Award. (Bild: Ceilix)")